Квадрокоптер 350-го размера с б/к моторами и GPS-датчиком Flying 3D X8. Установка на него комплекта FPV и стабилизированного подвеса с камерой.

Цена: 191,99$ + доставка
Поиск товара в других магазинах Китая
Всем не хворать! Сегодня представляю вашему вниманию обзор самого дешёвого (но вполне качественного) квадрокоптера 350-го размера (диагональ между осями моторов в мм, формат Фантома) с GPS.
Первый коптер этой модели я покупал в ноябре 2014 года за свои кровные 280 долларов в другом магазине и за это время основательно с ним разобрался. Когда мне предложили взять такой же квадрик на обзор, я согласился потому, что первый аппарат я вооружил экшн-камерой на двухосевом стабилизированном подвесе (это для него — максимум грузоподъёмности), а второй решил снабдить системой FPV с «дальнобойностью» не менее километра. Что из этого получилось — смотрим :-)

«Афигеть, дайте два!» © :-)
По сложившейся традиции — трек доставки:

30 дней. Это одна из самых долгих доставок за последние полгода. И самых безобразных. Коробка приехала сильно помятая. Настолько, что я даже не стал её фотографировать. В видео распаковки всё наглядно показано. Думал, что внутри коробки живых не окажется. Однако, оказался неправ. Всё-таки китайцы научились хорошо упаковывать хрупкие вещи. Респект им за это от всей души.


Сам квадрокоптер:

И вид снизу:

Если присмотреться внимательно, можно увидеть в передней части разъём USB для подключения к компьютеру, а чуть ниже — несколько однопиновых разъёмов для подключения подвеса. В инструкции метод описан понятно, поэтому здесь не буду на этом заострять внимание. Покажу лишь несколько фотографий, на которых всё видно:



Камера на этих фотографиях ещё старая, Мобиус в форм-факторе Гоупро. Сейчас на квадрик установлена Xiaomi Yi.
Батарейный отсек:
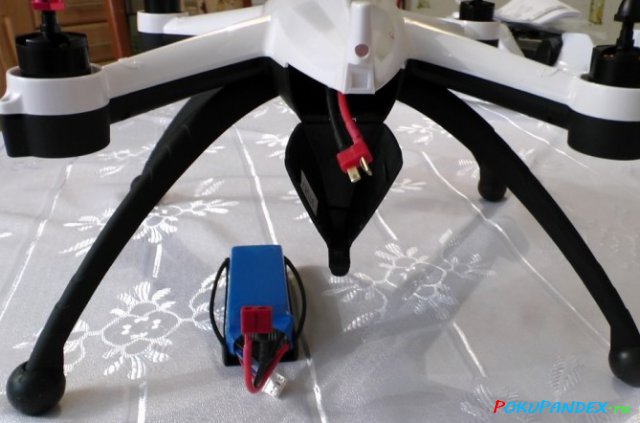
Есть аккумуляторы чуть бОльшей ёмкости (2650 mAh), которые влезают сюда без проблем:

но они требуют перепайки разъёма. Я имею такой аккумулятор. Время полёта на нём в спокойном режиме составляет около 13 минут.
Коротко о комплектации:
— Сам квадрокоптер
— 4 пропеллера (запасных нет)
— Зарядное устройство (весьма неплохое, балансирует банки с разбросом всего 0,02В)
— 4 самозатягивающихся гайки пропеллеров
— Аккумулятор 3S 2200mAh достойного качества (после 10 месяцев эксплуатации — как новый)
— Инструкция на английском языке
— Передатчик (кастрированный Flysky i6)
Это всё. В описании товара на сайте продавца www.gearbest.com в комплектации ещё присутствует USB-кабель, однако мне его не положили. Но это не проблема, их есть у меня с десяток :-)
Немного о передатчике:

Как уже было сказано выше, это Flysky i6, лишённый возможности добавлять новые модели и переназначать каналы управления. Однако, его функционала вполне хватает для полноценного управления квадрокоптером. Более того, несомненный плюс в том, что на экране передатчика отображается телеметрия с квадрокоптера.
А именно: при первом нажатии на верхнюю левую кнопку видим высоту, напряжение ходового аккумулятора, расстояние до коптера и его скорость. При втором нажатии появляются координаты квадрика в реальном времени. Третье нажатие позволяет узнать количество пойманных спутников, курс и погрешности при передаче пакетов. Четвёртое нажатие позволяет увидеть углы Pitch, Yaw и Roll. Вот такой совсем небедный набор данных.
Также, из плюсов передатчика хотелось бы отметить чрезвычайно цепкие стики (ну прямо иглы) и питание от 4-х элементов формата АА:

Ходы стиков очень мягкие. Я бы решил, что механизм собран на подшипниках, если бы не знал точно, что это не так. Сравнивал с имеющимся у меня Flysky i10 (он как раз таки на подшипниках) — разница минимальна.
Минус у передатчика есть. Стик газа не фиксируется посередине хода, что необходимо для полётов в режимах «Удержание высоты» и «GPS». Но я уже как-то привык обходиться без этой опции.
Уделю немного внимания техническим характеристикам предмета обзора:
— Полётный вес (с аккумулятором) 860г
— Максимальный угол наклона в полёте 30 градусов
— Скороподъёмность (вертикальная скорость) до 5 м/с
— Максимальная скорость в режиме GPS 18 км/ч
— Максимальная скорость в «ручном» режиме 36 км/ч (по паспорту), реально — около 45 (видео замера в конце обзора)
— Расстояние по диагонали между осями моторов 350 мм
— Высота 240 мм
— Пропеллеры 8Х4,5
— Моторы бесколлекторные, размер 2213 900 об/Вольт
— Регуляторы 12А
— Время полёта 7-10 минут в зависимости от стиля пилотажа
— Грузоподъёмность 440г (по паспорту, реально — 380)
— Дальность управления свыше 500 метров (по паспорту). При чистом эфире — до 800-900м
— Время полной зарядки аккумулятора около 2-х часов
Теперь о главном:
Квадрокоптер летает «из коробки»!
Как устанавливать пропеллеры (по стрелкам на корпусе), шасси и аккумулятор, я описывать не буду, это очень просто. Но перед первым полётом необходимо произвести одну ОЧЕНЬ важную операцию: калибровку компаса. Иначе возможен улёт квадрика «В Китай».
Калибровка компаса производится в следующем порядке:
— Включаем передатчик
— Подключаем аккумулятор к разъёму квадрокоптера и становимся СЗАДИ него
— Быстро дёргаем левым тумблером вверх-вниз несколько раз, пока светодиод в «попе» квадрокоптера не начнёт быстро моргать зелёным цветом
— Отставляем передатчик, берём квадрик в руки и крутимся вместе с ним вокруг вертикальной оси 3-4 оборота, пока светодиод не изменит цвет
— Поворачиваем квадрик ОТ СЕБЯ на 90 градусов и опять крутимся до изменения цвета и темпа моргания светодиода
— Отключаем питание квадрокоптера
— Процедуру повторять при переездах более 50 км
Это всё. Теперь можно летать!
Поговорим о полётных режимах:
Взлетать нужно, когда оба трёхпозиционных тумблера находятся в положении «от себя» (это «ручной» режим) и квадрокоптер видит не менее 7 спутников. Поиск спутников в поле обычно занимает 2-3 минуты. Взлетаем, просто добавляя газ, предварительно разблокировав моторы одновременным движением стиков вниз-внутрь. Квадрокоптер поднимается в безветренную погоду практически вертикально. При ветре необходимо корректировать подъём квадрика правым стиком.
Я полагаю, что человек, решивший потратить 200 долларов на подобную игрушку, уже должен иметь представление о радиоуправляемых квадрокоптерах, поэтому азы управления здесь расписывать не буду. Если у кого-нибудь будут вопросы по обучению — подробно и исчерпывающе отвечу в комментариях.
После взлёта можно сразу перейти в режим «GPS», потянув на себя до упора левый тумблер. При этом квадрокоптер зависнет в точке (если стик газа находится в среднем положении).
А можно этот тумблер щёлкнуть только один раз, тем самым оставив его в среднем положении. Это режим удержания высоты (опять-таки, при среднем положении стика газа).
Теперь можно управлять квадрокоптером только правым стиком. При этом наклоны будут до 30 градусов, как при ручном режиме и скорость соответствующей.
Поигрались? Теперь опять в «GPS» и переводим правый тумблер на один щелчок вниз. Режим «Headless». Какой бы стороной к вам не был бы повёрнут квадрик, он будет управляться так, как будто он находится «хвостом» к вам. Не знаю, зачем нужен этот режим. Я его протестировал и забыл за него. Гораздо интереснее режим «возврат домой».
Переводим правый тумблер до упора на себя, и что мы видим? Квадрокоптер взмывает вверх на 20 метров (этот параметр можно настраивать через программу, речь о которой пойдёт чуть ниже) и плавно возвращается в точку старта с вполне мягкой посадкой! То же самое произойдёт, если вдруг случайно из-за помех оборвётся связь, либо неожиданно сядут батарейки в передатчике. А можно просто выключить пульт и квадрокоптер всё равно прилетит сам на точку старта.
Исходя из моего 10-месячного опыта эксплуатации предмета обзора, могу ответственно заявить, что точность позиционирования при возврате домой составляет не более 2-3-х метров и зависит в поле только от наличия облачности (и, соответственно, от количества спутников, которые «видит» квадрик).
Теперь немного о запчастях и комплектующих.
Собственно, вот здесь есть всё: www.gearbest.com/flying-3d-x8-_gear/
Рекомендую категорически сразу заказать запасное шасси и для страховки — комплект пропеллеров. Да, с магазином можно торговаться. Я не удивлюсь, если после непродолжительной переписки шасси (ОСНОВНОЙ РАСХОДНИК) вам просто подарят.
Шасси — бич этого квадрокоптера и, наверное, его самый большой минус.
При падении с 30 сантиметров высоты «ноги» разлетаются просто в хлам. Поэтому «новичкам», купившим этот квадрик в качестве первого, категорически рекомендую садиться в режиме «Возврат домой». В этом случае разрушение шасси исключено.
Пропеллеры. Штатные неплохо отбалансированы. По крайней мере, ни первый, ни второй квадрокоптер у меня не «колбасило» из-за пропеллеров. Но мы же любим экспериментировать! Короче, на этот квадрик без подгонки (кроме балансировки) становятся 9-дюймовые винты от Walkera X350 Pro. На сайте gearbest.com я их не нашёл, поэтому, кому интересно — дам ссылку в комментариях (в обзоре по этическим соображениям не хочу выкладывать ссылку на магазин, конкурирующий с собственником предоставленного на обзор товара). У меня такие пропеллеры стоят на первом квадрокоптере Flying 3D X8. Однако, есть нюанс. Обратите внимание на самую первую фотографию в моём обзоре. На ту, которая «Дайте два». На правом (старом) квадрике на шасси нет резиновых шариков. 9-дюймовые винты при работе вводят эти шарики в резонанс, из-за чего идёт сильная раскачка всего квадрика и подвеса с камерой в частности. Поэтому мне пришлось избавиться от них.
Можно поставить и карбоновые пропеллеры. Ссылку, опять-таки, дам в комментариях по запросу. Но в этом случае придётся разбирать ВЕСЬ квадрокоптер (32 винтика) и поднимать моторы (плюс ещё 16) примерно на 3мм специальными (или случайными) шайбами. Второй вариант — обрезать карбон до диаметра 8,5 дюйма. Не знаю, есть ли в этом смысл. У меня лежит в загашнике комплект карбоновых пропеллеров. Поставить и испытать пока не сподобился, и так неплохо летает.
Пару слов о комплектации первого квадрокоптера:
Сразу был заказан недорогой стабилизированный двухосевой подвес на бесколлекторных моторах www.gearbest.com/rc-parts/pp_110479.html
Работал отлично, но после первого краша (вызванного сбоем GPS) показал свой норов. Победить до конца (настройкой PIDов) мне его так и не удалось. В безветренную погоду вроде бы всё нормально, но при ветре 4-5 м/с (или при резком газе) его начинает бить дрожь, которую он не в состоянии компенсировать. Следующее видео это наглядно показывает (до 02.50 всё нормально, потом склейка с другим видео — и понеслась...)
Камера Xiaomi Yi снимает отлично в разрешении 1080р 60fps и балансируется на этом подвесе прекрасно. Наверное, буду покупать другой подвес.
И вот самый первый ролик, снятый мной с помощью этого коптера и экшн-камеры Infinity CamOne:
Теперь переходим к софту:
Программу настройки полётного контроллера можно скачать здесь: bigflyshark.com/Home/Product/SharkX8# во вкладке SUPPORT файл Flight Controller Assistant1.3
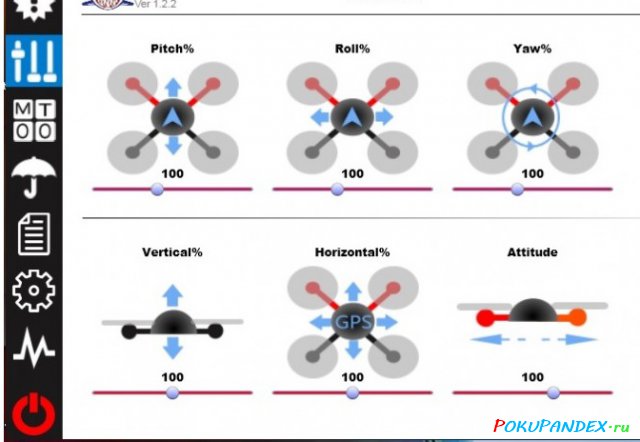
Что нам это даёт?
— Регулировку расходов:
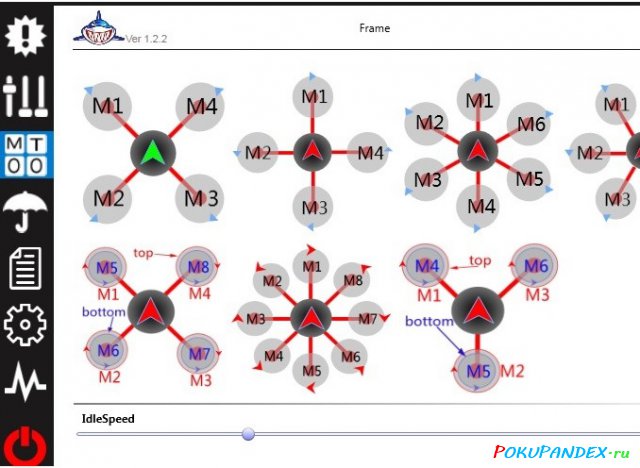
— Выбор типа коптера (неактуально):
— Регулировку высоты подъёма коптера в режимах «Возврат домой» и «Failsafe»
— Регулировку порога разряда аккумулятора, при котором происходит автоматическое приземление:
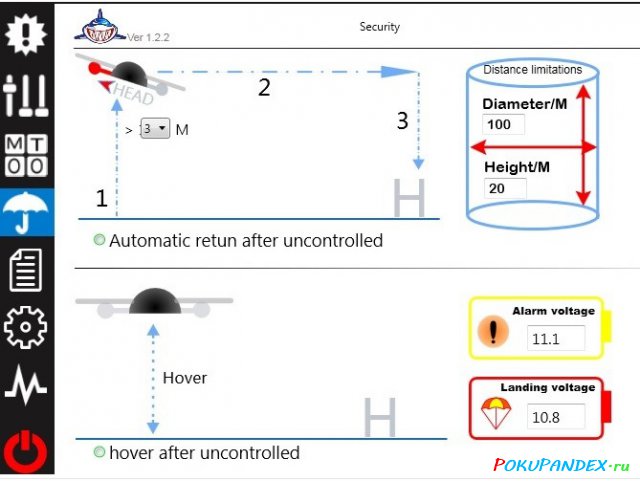
В принципе, «из коробки» нормально настроены все основные параметры. А именно — высота взлёта 20 метров при RTH, звуковой сигнал при 11,1 В и напряжение посадки 10,8 В. Этого хватает, чтобы коптер плавно опустился с высоты 50 метров. Я этот режим тестировал, всё работает отлично. Правда, пришлось долго ждать, пока аккумулятор разрядится до 10,8 В, поэтому видео записывать не стал.
Ещё пара нюансов: запускать эту программу нужно от имени администратора (щелчок правой кнопкой мыши по значку программы), иначе изменения не сохранятся. Чтобы программа «увидела» коптер, нужно сначала подключить аккумулятор, соединить квадрик с компьютером посредством кабеля USB и только после этого запускать программу от имени администратора. Но это для компьютерных гурманов. Повторюсь, что меня полностью устроили заводские установки.
Теперь о самом «вкусном» :-)
Для установки FPV-системы на этот квадрокоптер я использовал следующие компоненты:
— Аудио-видео передатчик, 5.8ГГц, 600 мВт ImmersonRC:

— Мини OSD Hobbyking G-OSD 3 c GPS модулем:

— Камера Sony CCD 800TVL:

— Аккумулятор для автономного питания Turnigy 1000mAh 3S 20C Lipo:

— Антенна-клевер ImmersionRC 5.8GHz V2:

— И самый главный элемент — очки Fat Shark Attitude:

Соединение компонентов особого труда не составило, минут 40 несложной пайки. Всё заработало с первого раза. Площадку сделал из канцелярской линейки длиной 50 см (как раз хватило). Прикрепил получившийся девайс к брюху квадрика с помощью липучки велкро и зафиксировал стяжкой:



Наземная станция у меня уже была собрана:

Предлагаю к просмотру следующие видеоролики:
Распаковка коробки, которой играли в футбол:
Замер максимальной скорости:
Полёт с тестированием режимов GPS, RTH, Failsafe и в очках:
Первый тест выявил низкое качество изображения в очках и на мониторе. Настройка меню камеры (весьма недешёвой, около 80$) ничего не дала. Я обратился к специалистам и они объяснили мне, что видеосигнал эта камера выдаёт слишком сильный. Мне немного непонятно, как аналоговый сигнал может быть «сильным» или «слабым», ну не спец я в аналоговом видео :-(
Мне посоветовали впаять в жёлтый провод между камерой и передатчиком подстроечный резистор на 1 КОм.
К сожалению, сделать я это не успеваю (завтра еду на отдых на 2 недели), поэтому прошу извинения за качество картинки с курсовой камеры. Приеду — обязательно разберусь с этим вопросом (если что — в запасе есть Pixim Seawolf 700 tvl).
Тем не менее, в очках я смог взлететь, сделать круг и нормально (без краша) приземлиться.
Запись с курсовой камеры квадрокоптера:
Один из владельцев предмета обзора сконструировал из пеноплекса вот такой бокс для транспортировки:

Я его повторять не стал, в моей машине много места, чтобы безопасно перевозить Х8, но кому-то наверняка пригодится.
Если нужна дополнительная информация по этому квадрокоптеру — здесь www.rcgroups.com/forums/showthread.php?t=2217137 ПОДРОБНЕЙШИЙ обзор этой модели от моего знакомого из Франции Себастьяна и 295 страниц обсуждения. Всё на английском языке, но с помощью гуглоперевода понять можно.
Ну вот вроде и всё. Всем пока и до новых встреч!