Обзор гоночного квадрокоптера Walkera Runner 250 Basic 3

Цена: 279,99$
Поиск товара в других магазинах Китая
Категорически приветствую всех любителей р/у моделей, в частности — коптероводов и вообще всех читателей! Представляю вашему вниманию обзор квадрокоптера Walkera Runner 250 в комплектации Basic 3. Товар предоставлен магазином для написания обзора.
Посылка ехала около 35 суток. Многовато. Зато Почта РФ практически не издевалась над ней. Подарочная коробка сохранила вполне презентабельный вид:

Лишь левый нижний угол оказался слегка замятым, что не повлияло на целостность содержимого.
Немного о комплектации:
Этот квадрокоптер доступен в весьма широком спектре комплектаций, от «голого» варианта и до «супер» с GPS и видеоочками. Цены отличаются в разы.
Например:
$ 155,39 www.gearbest.com/rc-quadcopters/pp_202829.html
$ 225,59 www.gearbest.com/rc-quadcopters/pp_227357.html
$ 259,99 www.gearbest.com/rc-quadcopters/pp_198205.html
$ 279,99 www.gearbest.com/rc-quadcopters/pp_198207.html
$ 388,61 www.gearbest.com/rc-quadcopters/pp_249437.html
$ 503,38 www.gearbest.com/rc-quadcopters/pp_242423.html
$ 649,99 www.gearbest.com/rc-quadcopters/pp_198208.html
$ 783,53 www.gearbest.com/rc-quadcopters/pp_240432.html
Мне досталась комплектация Basic 3, и о ней расскажу чуть подробнее.
В коробке присутствовал следующий набор компонентов:
1. Сам квадрокоптер в сборе (моторы WK-WS-28-014, регуляторы ESC RUNNER 250, «мозги» FCS-RUNNER 250, видеопередатчик TX5816, курсовая камера Resolution: 800TVL System Commitee: PAL / NTSC Output Power: 1.0Vp — p / 75Ω Input Power: DC 12V, плата OSD)
2. Передатчик Walkera Devo 7
3. Аккумулятор 3S 2200 мАч 25С
4. Зарядное устройство 1 А (маловато на мой взгляд) 2-3S
5. Один комплект самозатягивающихся пропеллеров (запаса нет)
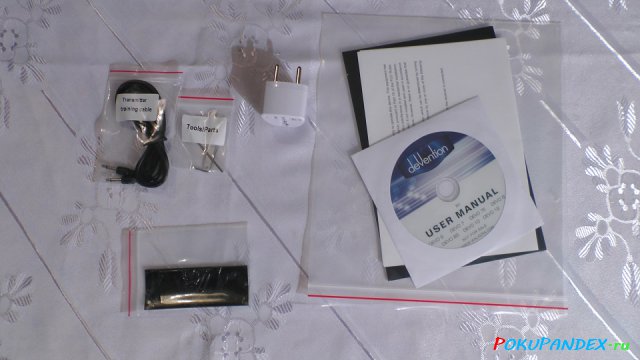
6. Компакт-диск с инструкцией на английском языке
7. Набор инструментов (ключ и два шестигранника)
8. «Липучка» для крепления аккумулятора
9. Кабель «тренер-ученик»


Кратко о технических характеристиках:
— диаметр пропеллеров 140 мм
— размеры квадрокоптера 225 x 205 x 92 мм
— вес с аккумулятором 530г
— время полёта 12-14 минут (заявлено производителем. Реально 10-11 минут)
— диапазон температур от -10 до +40 градусов Цельсия
— дальность связи до 1000 метров
Рама типа «сэндвич» (верх и низ — карбон, середина — пластик). Забегая вперёд, хочу отметить, что все части рамы (как и остальные компоненты квадрокоптера) доступны для заказа. Модульная конструкция — огромный плюс Walkera Runner 250. Все электронные компоненты соединяются без пайки, на обычных разъёмах.

Также, хочется отметить «правильный» силовой разъём XT-60, жёстко закреплённый в задней части рамы. Благодаря этому, очень удобно подключать и отключать аккумулятор.

Две антенны, расположенные под углом 90 градусов друг к другу (которые складываются вдоль рамы в транспортировочном варианте) дают уверенность в надёжности приёма радиосигнала.
Рама квадрокоптера снабжена виброгасящей развязкой

Надеюсь, что она поможет сделать изображение с пишущей камеры (планирую использовать 808#16) более стабильным. Видео будет в конце обзора. Есть у меня и Mobius Action Cam, который пишет в разрешении FHD (808#16 выдаёт честное HD при 30 кадрах в секунду), но Мобиус весит 40г против 17г 808#16. Я считаю — чем легче — тем лучше.
Подсветка квадрика — выше всяких похвал. Впереди находятся две ярчайших белых «фары», а сзади — пара красных «стопарей». Ошибиться в ориентации невозможно даже днём и на большом удалении. При использовании квадрика по прямому назначению (гонки в очках с препятствиями) подсветка очень сильно помогает предотвратить столкновения в воздухе.
Поговорим о передатчике:
Как уже было сказано выше, это хорошо известный Walkera Devo 7.
Передатчик бюджетный, стоит около 58 долларов www.gearbest.com/rc-quadcopter-parts/pp_218270.html однако позволяет запрограммировать несколько моделей и настраивать каждую индивидуально в широком диапазоне регулировок. Для кого-то этот передатчик чересчур «замороченный» из-за нетрадиционного меню, но мне он таковым не показался. Наверное, из-за того, что я уже около двух лет пользуюсь его «старшим братом» Devo 8S.
Фото Devo 7:

Питание передатчика осуществляется посредством восьми элементов (или аккумуляторов) формата АА (пальчики), что есть плохо. Однако, этот недостаток легко нивелируется наличием разъёма JST, что позволяет использовать Li-Po аккумуляторы 3S
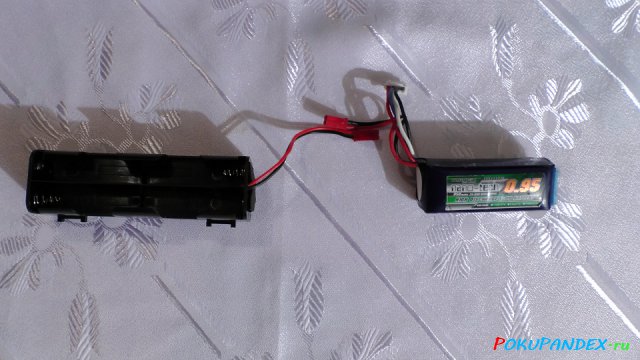

Как видно на крайнем фото, я применил аккумулятор Turnigy nano tech 950mah 3S 25-50C
Аккумулятор, установленный в передатчик, можно заряжать без демонтажа благодаря стандартному разъёму, которым снабжён Devo 7

Для особо внимательных читателей, владеющих английским языком и вычитавшим, что Li-Po аккумуляторы отсутствуют в списке разрешённых для применения в этом передатчике, поясню, что для питания своего Devo 8S (изначально также рассчитанном на применение Ni-Mh аккумуляторов или элементов АА) я уже 2 года использую Li-Po аккумулятор. И ничего плохого за это время не случилось. Так что однозначно это можно (и нужно) делать.
В левой стороне обратной стороны передатчика есть разъём под кабель «тренер-ученик», присутствующий в комплекте.

Это позволяет проводить обучение начинающих коптероводов с тренерского передатчика. Записываем в «плюсы» однозначно.
Пора приступать к полётам!
Пропеллеры (как уже было отмечено выше) самозатягивающиеся, так что перепутать их невозможно. В комплекте есть ключ для них, но его наличие чисто номинально. Я просто накрутил винты по резьбе (даже не затягивал) и при первом пуске коптер всё сделал сам.
Сначала включаем передатчик. Сразу после этого нужно соединить силовые разъёмы коптера и аккумулятора, который надёжно фиксируется застёжкой Velсro, присутствующей в комплекте. Один нюанс: не стоит задвигать аккумулятор вглубь до упора. Центровка получится передней, из-за чего коптер при резком старте рванёт вперёд. Нужно разместить аккумулятор как можно «задистее».
После включения питания коптера загорятся передние белые светодиоды (довольно ярко), а задние красные, моргнув несколько раз, потухнут. Привязка к передатчику прошла успешно.
Левый стик передатчика (газ) отводим влево-вниз, чем разблокируем моторы. Забегая вперёд, скажу, что блокировка моторов после полёта производится этим же стиком «вниз-вправо».
Теперь можно взлетать. Для тех, у кого этот квадрик первый из «серьёзных» сразу скажу, что, несмотря на наличие «6-осевой стабилизации» (система из 3-х гироскопов и 3-х акселерометров) при взлёте (и первых полётах) управлять этим квадрокоптером нужно предельно аккуратно и плавно. Так, как в конце моего видео распаковки (взлёт над столом в комнате), делать нельзя ни в коем случае. Это чревато серьёзными повреждениями аппарата, конечностей владельца и зрителей.
И ещё один важный момент: Walkera Runner 250 приедет к вам с ненастроенным Failsafe. Это означает, что при потере сигнала квадрокоптер продолжит полёт и может улететь в неизвестном направлении. Чтобы этого не случилось, нужно в передатчике настроить Failsafe.
Делается это так: Заходим в меню Function и листаем его вниз до пункта Safe. Затем жмём Enter. Далее находим Thro и меняем Hold на Safe. Устанавливаем L 100%. Всё, теперь при потере сигнала моторы остановятся. Квадрик упадёт (так как он не возвращается «домой» ввиду отсутствия GPS). Может сломаться пропеллер (рама не должна, она очень прочная) но зато квадрокоптер не улетит.
Заказывая этот квадрокоптер на обзор, я знал, что его видеопередатчик имеет всего 8 каналов и работает на частоте 5,8 ГГц в диапазоне «В» (5733-5866 ГГц).

Для FPV полётов у меня имелось два девайса: видеоочки Fatshark Attitude

8-канальный видеоприёмник этих очков работает в диапазоне «F»

Второе устройство — наземная станция собственного изготовления с 32-канальным приёмником, накрывающим все 4 диапазона 5,8 ГГц.
К чему я это пишу? Я очень сильно сомневался в том, что этот квадрик будет работать с моими очками. Но я знал точно, что с наземной станцией будет всё в порядке. Но полёты по монитору — это совсем не то, что в очках. Нет ощущения «полного погружения»… Хотел специально для Walkera Runner купить очки с 32-канальным приёмником www.gearbest.com/fpv-system/pp_226087.html но что-то меня остановило. Решил проверить: а вдруг передатчик квадрика окажется совместим по частоте с имеющимися у меня очками? И, о чудо! Всё заработало на частоте очков 5860 МГц!!!
Я реально танцевал джигу :-) Радости моей не было предела!
Так что имейте в виду, диапазоны «F» и «В» перекрываются. Если у вас есть очки Fatshark, то вы сможете в них летать на предмете обзора!
Предлагаю несколько фото сабжа в естественной среде обитания: :-)





Особенностью комплектации Basic 3, доставшейся мне на тестирование, является наличие в квадрокоптере платы OSD (OnScreen Display).

что позволяет во время полёта видеть такие важнейшие параметры, как напряжение аккумулятора, удаление от базы, скорость, высоту и т.д. Но это при наличии GPS. В моей комплектации работает только авиагоризонт в двух плоскостях (elevator и aileron) и вольтметр. Что, в принципе, уже неплохо.

Вот видео с рекордера наземной станции:
Приношу извинения за помехи. Причину обнаружил уже после полётов. Один из усиков антенны-клевера приёмника наземной станции отломился и контакт то был, то не было. В очках всё было видно прекрасно.
На виброгасящую систему я, как писал выше, установил камеру-брелок 808#16 с качеством записи 720р при 30-ти кадрах в секунду. В итоге получил бешеное желе :-(
То ли требуется балансировка пропеллеров (пока что не представляю себе, как это сделать, ведь они идут в сборе с гайками), либо замена демпферов на более жёсткие. Есть ещё одна догадка: когда я осматривал квадрик после полётов, обнаружил, что один из демпферов выскочил из своего гнезда. Возможно, это случилось в результате жёсткой посадки (в конце видео это видно), а, может так было изначально и желе именно из-за этого косячка. Буду разбираться. Думаю, что решу эту проблему.
Вот видео:
Хотелось бы подчеркнуть один нюанс, который нигде (насколько мне известно) не афишируется.
Walkera Runner 250 имеет 2 режима полётов в заводской комплектации. Когда все тумблеры на передатчике находятся в положении «от себя», квадрокоптер летает в режиме 6-осевой стабилизации. То есть, он летит в сторону отклонённого правого стика пульта до тех пор, пока вы отклоняете этот стик. Стоит лишь отпустить стик и квадрик сам станет в горизонт по осям pitch и roll (elevator и aileron).
Если вы потянете тумблер FMOD (верхний правый) на себя до упора (два щелчка), то Walkera Runner перейдёт в режим «автофлип» и при отклонениях правого стика передатчика будет переворачиваться на 360 градусов в ту же сторону.
Но, пожалуйста, аккуратнее с этим режимом. Выглядит красиво (на следующем видео это есть), но не стоит забывать о том, что скорость вращения пропеллеров достигает 15000 (да, пятнадцать тысяч) оборотов в минуту. Поэтому не летайте ближе, чем метров 20 от себя. Также, требуется запас по высоте (минимум метров 15). И при выполнении флипов обязательно нужно хотя бы немного прибавлять газ.
Вот видео первого полёта:
Видео распаковки:
В заключение хотелось бы поблагодарить интернет-магазин www.gearbest.com за предоставленный на обзор квадрокоптер. Рекомендую всем почаще заглядывать на сайт магазина потому, что на некоторые товары иногда цены бывают просто «волшебные». Жаль, что магазин не особо афиширует подобные акции.
P.S. Думаю, что ни для кого не секрет, что товары, присланные на обзор, подлежат продаже. Вот я и подумал, что не будет никакого криминала, если я предложу купить этот квадрокоптер. Ценник пусть будет на 10% ниже китайского. Все предложения — в личку. Доставка по России — за мой счёт.
P.P.S. Подписывайтесь на мой канал www.youtube.com/channel/UC521GOZG4NvMRIRK4mksdBw
и вступайте в мою группу в ВК vk.com/mikerckonst
Бесплатные консультации по покупке, эксплуатации, апгрейду и ремонту радиоуправляемых моделей для всех подписчиков моего канала и членов группы!